Transformation of axes
Transformation of axes is a fundamental concept in coordinate geometry, involving the change from an original coordinate system to a new one through translation, rotation, or a combination of both. This process is pivotal in simplifying the representation of geometric figures and in solving complex geometric problems.
These transformations are essential in coordinate geometry and physics, where they are used to simplify problems, analyze motion, and understand transformations in different coordinate systems. Through these equations, one can effectively rotate, translate, or apply a combination of both to a coordinate system, aiding in the geometrical interpretation and solution of problems.
Translation of Axes
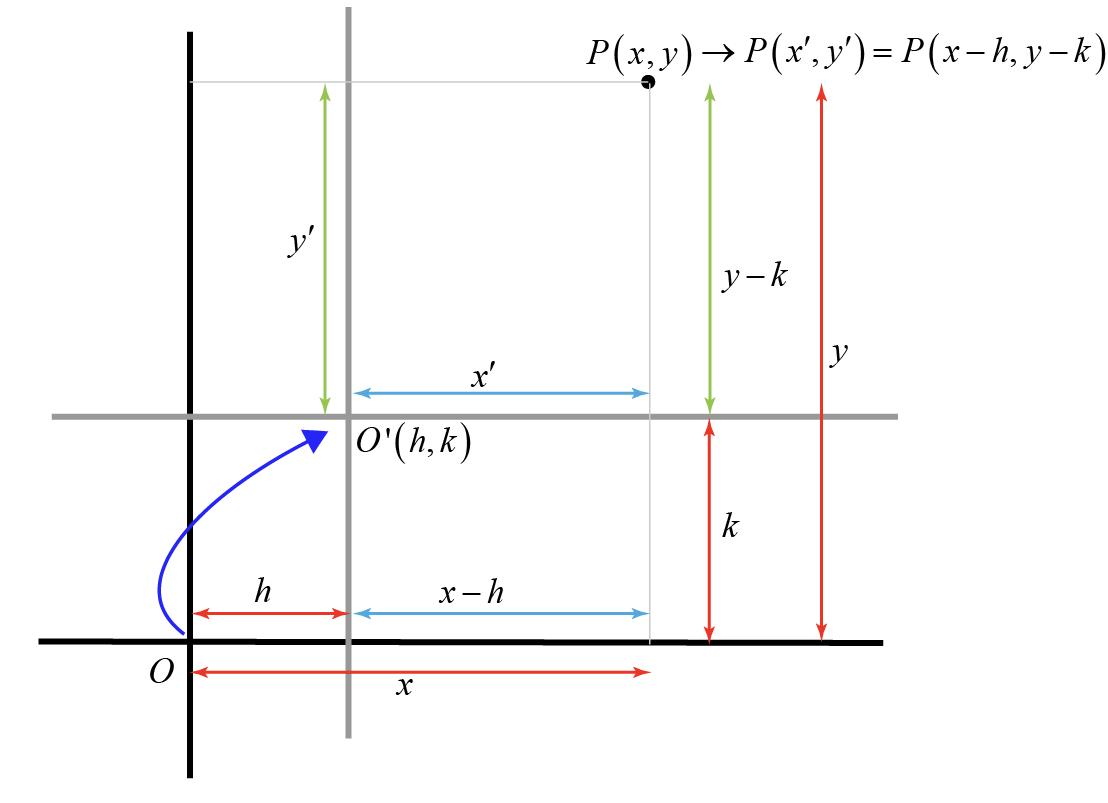
Consider a Cartesian coordinate system with its origin at \(O\). Let \(P\) be a point within this system, having coordinates \((x, y)\). Now, if we shift the origin to a new point \(O'(h, k)\) without changing the orientation in the original system, we establish a new coordinate system. In this new system, the coordinates of \(O'\) become \((0,0)\), indicating its position as the new origin. As a result of this shift, the coordinates of point \(P\) will change to accommodate the new frame of reference. Suppose the new coordinates of \(P\) in this shifted system are \((x', y')\). Given the translation of the origin and maintaining the orientation of the axes, it follows that the relationship between the old and new coordinates of \(P\) can be expressed as \(x' = x - h\) and \(y' = y - k\). This transformation effectively recalibrates the coordinate system, considering \(O'\) as the new reference point, thus altering the perceived position of \(P\) relative to this new origin.
Example
Given a point \(P\) in a Cartesian coordinate system with coordinates \((5, 4)\), let's translate the origin to a new point \(O'(2, 1)\) without altering the orientation of the axes. This shift to a new origin \(O'\) creates a new coordinate frame.
In the original system, the coordinates of \(P\) are \((5, 4)\). After translating the origin to \(O'(2, 1)\), the coordinates of \(P\) in the new frame can be determined using the transformation equations:
Substituting the given values, where \(h = 2\) and \(k = 1\), into these equations yields:
Therefore, in the new coordinate system with the origin at \(O'(2, 1)\), the new coordinates of point \(P\) are \((3, 3)\). This example illustrates how translating the origin of a coordinate system to a new location affects the coordinates of points within that system.
Effect of translation on equation of curves
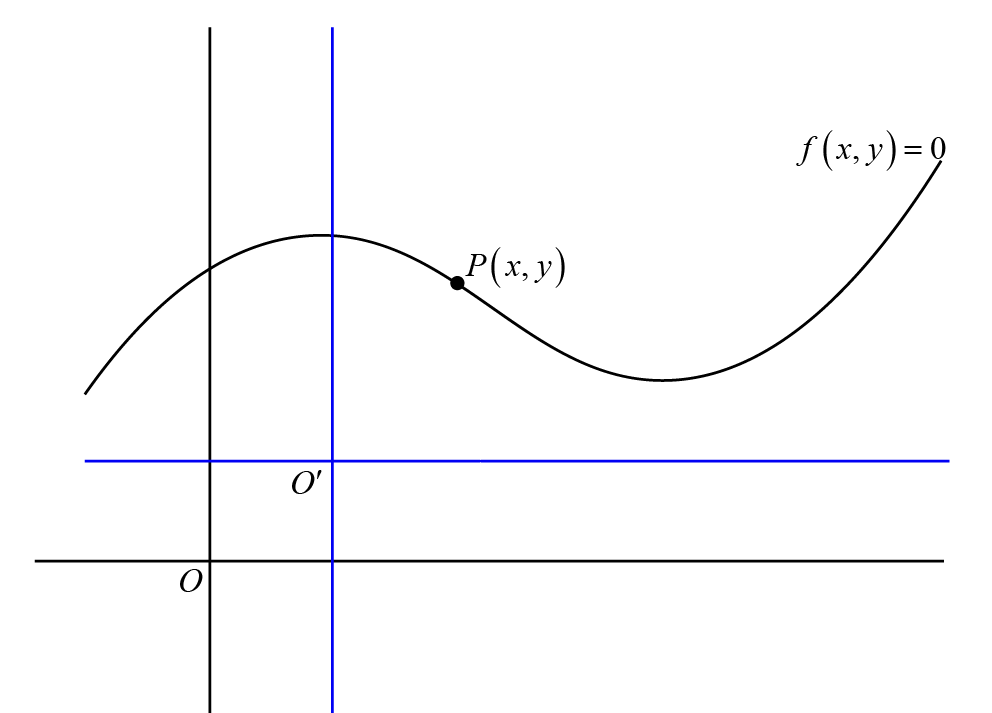
Consider a curve defined by the equation \(f(x, y) = 0\). Let \(P(x, y)\) be a point on this curve. If we shift the origin of the coordinate system to a new point \(O'(h, k)\), the coordinates of point \(P\) in relation to this new origin become \((x', y')\), where \(x' = x - h\) and \(y' = y - k\). This translation alters the frame of reference for the coordinates of points on the curve.
To express the curve in terms of the new coordinates, we first find the relationship between \(x'\) and \(y'\) and the original coordinates. We reverse the translation by writing \(x = x' + h\) and \(y = y' + k\). Since the original coordinates \(x\) and \(y\) satisfy the equation \(f(x, y) = 0\), substituting the expressions for \(x\) and \(y\) in terms of \(x'\) and \(y'\) gives us the new equation of the curve in the translated coordinate system:
This equation represents the new relationship between \(x'\) and \(y'\), and hence, the new equation of the curve in the context of the shifted origin.
For simplicity and to align with common mathematical conventions, we often drop the prime notation in the final expression and simply represent the new coordinates as \(x\) and \(y\) again. Therefore, to find the equation of the curve in the new coordinate system, we substitute \(x\) with \(x + h\) and \(y\) with \(y + k\) into the original equation \(f(x, y) = 0\), resulting in:
This transformed equation describes the curve in the new coordinate system after the origin has been shifted to \(O'(h, k)\), effectively incorporating the translation into the equation of the curve.
Example
Let's consider the example of a curve in a Cartesian coordinate system described by the equation \(y = x^2\). We intend to shift the origin of the coordinate system to a new point \(O'(-1, 2)\). This shift involves translating the origin to the left by 1 unit and up by 2 units.
The new coordinates \((x', y')\) in relation to the new origin \(O'\) are connected to the original coordinates \((x, y)\) by the transformation equations:
To find the equation of the curve in the new coordinate system, we express the original coordinates in terms of the new coordinates:
Substituting these expressions into the original equation of the curve \(y = x^2\) gives:
Therefore, the new equation of the curve, with respect to the shifted origin at \(O'(-1, 2)\), is:
This equation describes the shape and position of the original curve in the new coordinate system, where the origin has been shifted to the point \((-1, 2)\).
Example
Given the equation of a curve \((x-2)^2 + (y-3)^2 = 9\) in a Cartesian coordinate system, determine the new equation of the curve when the origin is shifted to the point \((2, 3)\).
Solution:
Given the curve \((x-2)^2 + (y-3)^2 = 9\) in a Cartesian coordinate system, shifting the origin to the point \((2, 3)\) involves a simple replacement in the equation of the curve where \(x\) is replaced by \(x + 2\) and \(y\) is replaced by \(y + 3\). Performing these replacements, the equation becomes:
Simplifying this, we get:
This is the new equation of the curve with respect to the shifted origin at \((2, 3)\).
Why do we shift origin?
To understand consider the equation \(\frac{(x-2)^2}{5} + \frac{(y+1)^2}{3} = 1\). This is the equation of an ellipse. You will study about why this is an equation of the ellipse in later chapters.
So, given the equation of an ellipse \(\frac{(x-2)^2}{5} + \frac{(y+1)^2}{3} = 1\), shifting the origin to the point \((2, -1)\) simplifies the equation. To achieve this simplification, in the given equation, we replace \(x\) with \(x + 2\) and \(y\) with \(y - 1\), reflecting the shift of the origin to \((2, -1)\).
Applying these substitutions:
Simplifies to:
Thus, after shifting the origin to \((2, -1)\), the new equation of the ellipse becomes \(\frac{x^2}{5} + \frac{y^2}{3} = 1\). This process illustrates how shifting the origin to a suitable point can streamline the equation of a geometric figure, making it easier to work with.
Thus, we can say that shifting the origin of a coordinate system is primarily employed to simplify the equations of curves or geometric figures. This transformation can reduce the complexity of mathematical expressions, making both analytical and computational work more efficient. By relocating the origin to a more strategically advantageous position, certain terms in the equation of a curve might be eliminated or reduced, leading to a simpler form. This simplification can facilitate easier analysis, integration, differentiation, or graphical representation of the curve. Essentially, the process of shifting the origin is a tool for making complex problems more manageable by adapting the coordinate system to suit the specific requirements of the problem at hand.
Consider another example. Sometimes we wish to eliminate certain terms of an equation of a curve. We can achieve that many times just by shifting the origin.
Example
Problem:
Given a cubic equation \(y = ax^3 + bx^2 + cx + d\), determine how to shift the origin to eliminate the square term \(bx^2\), and derive the new equation of the curve in the shifted coordinate system.
Solution:
To eliminate the square term from the cubic equation \(y = ax^3 + bx^2 + cx + d\) by shifting the origin, let's assume we shift the origin to a new point \((h, k)\). With this shift, we replace \(x\) with \(x + h\) and \(y\) with \(y + k\). Substituting these into the original equation gives:
Expanding the terms:
Simplifying and collecting like terms:
To eliminate the \(x^2\) term, set the coefficient of \(x^2\) to 0:
Solving for \(h\):
Therefore, by shifting the origin to \(\left(-\frac{b}{3a}, k\right)\), where \(k\) is any value (since the value of \(k\) does not affect the elimination of the \(x^2\) term), the square term in the cubic equation is eliminated. The transformed equation will not have an \(x^2\) term, simplifying to a form without the quadratic component.
Depressed Cubic Equation
A depressed cubic equation is a form of a cubic equation where the quadratic term is eliminated, resulting in an equation of the form \(y = ax^3 + px + q\). The primary purpose of transforming a general cubic equation \(y = ax^3 + bx^2 + cx + d\) into a depressed cubic is to simplify the process of finding its roots. By eliminating the \(x^2\) term, the equation becomes easier to solve, either algebraically or through other methods such as Cardano's formula.
Rotation of Axes
The rotation of axes in a two-dimensional plane involves turning the original coordinate system about the origin by a specified angle. When the coordinate axes are rotated anticlockwise by an angle \(\theta\), the coordinates \((x', y')\) of a point \(P\) in the rotated system relate to its coordinates \((x, y)\) in the original system by the transformation equations:
Proof:
In the Cartesian coordinate system, point \(P\) has coordinates \((x,y)\) in the original frame with axes \(OX\) and \(OY\), and coordinates \((x',y')\) in the rotated frame with axes \(OX'\) and \(OY'\). The system is rotated anticlockwise by an angle \(\theta\).
Do the construction as shown in the figure.
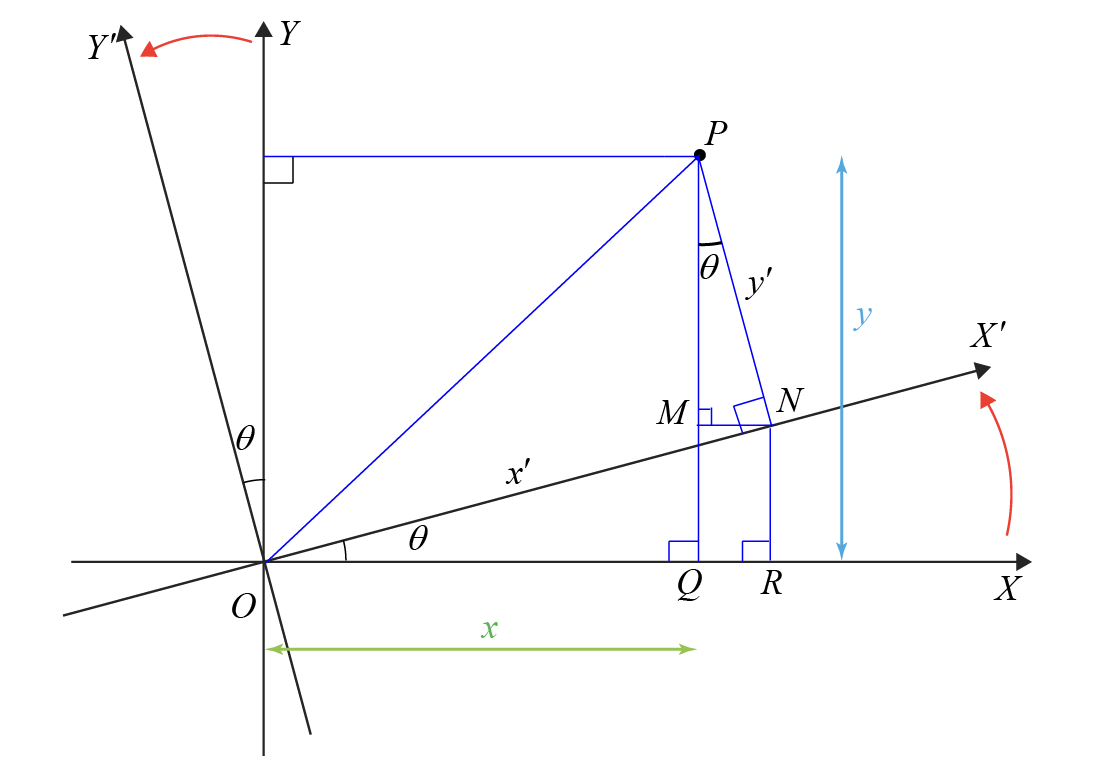
From the construction, line \(PM\) is parallel to the \(OY\) axis and line \(PN\) is parallel to the \(OY'\) axis, which implies \(\angle MPN = \theta\) since it corresponds to the angle between \(OY\) and \(OY'\).
In \(\triangle PMN\), the length \(MN\) can be determined using \(y'\) and \(\theta\):
In \(\triangle ONR\), which is right-angled at \(N\), \(OR\) represents \(x'\) projected onto the \(OX\) axis:
The horizontal distance \(OQ\) can be found by subtracting \(MN\) from \(OR\):
The vertical component \(NR\) in \(\triangle ONR\) is the projection of \(x'\) on the \(OY\) axis:
For \(PQ\), which is the vertical distance from the original \(OX\) axis to point \(P\), we consider the vertical distances \(PM\) and \(MQ\):
Summing these gives the \(y\) coordinate in the original system:
Thus, the new coordinates \((x,y)\) of point \(P\) after the rotation by \(\theta\) in terms of the rotated coordinates \((x',y')\) are:
Starting with the equations for the coordinates \( (x, y) \) after an anticlockwise rotation by \( \theta \) in terms of the new coordinates \( (x', y') \):
To express \( x' \) in terms of \( x \) and \( y \), we multiply equation (1) by \( \cos(\theta) \) and equation (2) by \( \sin(\theta) \), then add the results:
Adding equations (3) and (4):
For \( y' \), we multiply equation (1) by \( \sin(\theta) \) and equation (2) by \( \cos(\theta) \), then subtract equation (1) from equation (2):
Now, subtract equation (5) from equation (6):
Therefore, the new coordinates \( (x', y') \) in terms of the original coordinates \( (x, y) \) are:
The transformation of coordinates from the original system \((x, y)\) to the rotated system \((x', y')\) after an anticlockwise rotation by an angle \(\theta\) is given by:
Conversely, to transform back from the rotated system \((x', y')\) to the original system \((x, y)\), the equations are:
These sets of equations allow conversion between the two coordinate systems before and after the rotation of axes.
Simplifying the General Equation of Conics
The general second-degree equation \(ax^2 + 2hxy + by^2 + 2gx + 2fy + c = 0\) encompasses all conic sections—ellipses, hyperbolas, and parabolas—depending on the values of its coefficients. Our focus will be on techniques to simplify this equation through translation and rotation of axes, without delving into the specific nature of the conics it may represent. You need not worry too much about what it represents and how. Our main focus is learning how to eliminate \(xy\) term and linear \(x\) and \(y\) terms.
Translation is used to remove the linear terms \(2gx\) and \(2fy\) by shifting the origin to a suitable point \((h, k)\).
Rotation of axes aims to eliminate the \(xy\) term. This is achieved by rotating the coordinate system by a specific angle \(\theta\).
By simplifying this equation the study of these curves become much simpler.
Eliminating linear terms (2gx and 2fy)
To eliminate the linear terms \(2gx\) and \(2fy\) from the general second-degree equation \(ax^2 + 2hxy + by^2 + 2gx + 2fy + c = 0\), we will translate the origin to the point \((\alpha, \beta)\) and then replace \(x\) with \(x + \alpha\) and \(y\) with \(y + \beta\) in the general second-degree equation \(ax^2 + 2hxy + by^2 + 2gx + 2fy + c = 0\). Expanding this transformation step by step yields:
After expanding and simplifying, we collect terms to express the equation in the form that facilitates setting the coefficients of \(x\) and \(y\) to zero:
Now, focusing on the linear terms in \(x\) and \(y\), to eliminate these terms, we set their coefficients to zero:
Solving these equations for \(\alpha\) and \(\beta\) will give us the values needed to shift the origin such that the linear terms in the equation are eliminated, simplifying the equation of the conic.
Cross-multiplication yields:
From the cross-multiplication rule, we deduce:
Therefore, shifting the origin to \(\left(\frac{hf - bg}{ab - h^2}, \frac{hg - af}{ab - h^2}\right)\) results in elimination of linear terms.
Warning
The condition \( ab - h^2 \neq 0 \) must hold to avoid an undefined situation, as it is the denominator in the expressions for \( x \) and \( y \). In the case when \( ab - h^2 = 0 \), the terms \( 2gx \) and \( 2fy \) could not be eliminated through the process of shifting the origin, as it would lead to division by zero, which is undefined.
Invariance of Quadratic Terms Under Coordinate Shift**
Let the general quadratic equation in two variables be given by
Consider a shift in the coordinate system such that the origin is moved to the point \((\alpha, \beta)\). Under this transformation, where \( x \) is replaced by \( x + \alpha \) and \( y \) is replaced by \( y + \beta \), the coefficients of the quadratic terms \( ax^2 \), \( 2hxy \), and \( by^2 \) remain unchanged, while the linear and constant terms are transformed.
Proof: Upon replacing \( x \) with \( x + \alpha \) and \( y \) with \( y + \beta \) and expanding, the equation becomes:
Expanding and simplifying, we obtain:
The coefficients of \( ax^2 \), \( 2hxy \), and \( by^2 \) are preserved post transformation. Thus, the theorem is established, demonstrating the invariance of the quadratic terms with respect to the shift of the coordinate system's origin.
Constant term and the final transformed equation
Now we know that by setting \(\alpha = \frac{hf - bg}{ab - h^2}\) and \(\beta = \frac{hg - af}{ab - h^2}\), we achieve the elimination of the linear terms \(2gx\) and \(2fy\) in the general quadratic equation \(ax^2 + 2hxy + by^2 + 2gx + 2fy + c = 0\), while the quadratic terms \(ax^2\), \(2hxy\), and \(by^2\) remain as is. This results in an important consequence for the new constant term.
The new constant term, as derived, is given by equation (1):
By utilizing the simultaneous equations (2) \(ax + bp + g = 0\) and (3) \(ha + bp + f = 0\), the constant term can be expanded as follows:
Substituting \(\alpha\) and \(\beta\) into this expression yields:
This is succinctly expressed using a determinant \(\Delta\):
Therefore, the constant term in the transformed quadratic equation is \(\frac{\Delta}{ab - h^2}\), hence:
Thus, the equation \( ax^2 + 2hxy + by^2 + 2gx + 2fy + c = 0 \) when the origin is translated to \( \left( \frac{hf-bg}{ab-h^2}, \frac{hg-af}{ab-h^2} \right) \), the new equation is:
where \( \Delta \) is the determinant given by
Example
Given the quadratic equation:
Find the point where origin must be shifted to eliminate the linear terms and the transformed equation.
Solution:
Given the equation:
we identify the coefficients as \( a = 2 \), \( h = 5 \), \( b = 1 \), \( g = -2 \), and \( f = 1 \).
To eliminate the linear terms, we calculate \(\alpha\) and \(\beta\) using the formulas:
Substituting the coefficients, we get:
Next, we compute the determinant \(\Delta\):
Now, we find the constant term \( \frac{\Delta}{ab - h^2} \):
Finally, we substitute this constant term into the new equation without linear terms:
This is the new equation after shifting the origin to eliminate the linear terms.
Eliminating the xy term
There are very strong reasons that you will get to learn in future to eliminate xy term. To eliminate the \(xy\) term in the general second degree equation \(ax^2 + 2hxy + by^2 + 2gx + 2fy + c = 0\), a rotation of axes is applied, as a translation of the origin cannot remove terms involving both \(x\) and \(y\).
Upon rotating the axes anticlockwise by an angle \(\theta\), the new coordinates \(x'\) and \(y'\) can be expressed in terms of \(x\) and \(y\) as follows:
Substituting these into the equation, and expanding, we get:
To set the coefficient of the \(xy\) term to zero after the rotation, we focus on the term:
This coefficient needs to be equal to zero for the \(xy\) term to vanish. Therefore, we solve:
Using trigonometric identities \(\cos^2\theta - \sin^2\theta = \cos 2\theta\) and \(\sin\theta\cos\theta = \frac{1}{2}\sin 2\theta\), the equation becomes:
Rearranging and solving for \(\tan 2\theta\):
Thus, the angle \(\theta\) required to eliminate the \(xy\) term through rotation is given by:
Setting \(\theta\) to this value during the rotation ensures that the \(xy\) cross-term in the quadratic equation is eliminated.
Clearly the formula is true only when \(a\neq b\).
When \(a=b\), we see from equation [E] that \(cos2\theta=0\). On solving this we get,
where \( k \) is an integer. Thus,
for \( k \) an integer.
Invariance
Invariance in mathematics refers to a property or characteristic of an object, operation, or mathematical expression that remains unchanged under a specified set of transformations or operations.
**Invariance in Geometry:
In geometry, invariance refers to properties that remain unchanged under transformations like translation and rotation. Common geometric invariants include area of a closed region, perimeter of a closed figure, angle between two lines, and distance between points.
With respect to rotation of axes, distance of a point from the origin is invariant, but it is not invariant with respect to translation of origin.
Invariance in Algebra:
In algebra, invariance involves expressions or equations maintaining their form under operations such as substitution, scaling, or other algebraic manipulations.
Algebraic invariance in the general quadratic equation
Translation
In the context of the general second-degree equation \(ax^2 + 2hxy + by^2 + 2gx + 2fy + c = 0\), when considering transformations such as translations of the coordinate axes, specific coefficients exhibit invariance while others do not.
Invariant Coefficients:
- a, h, b: These coefficients, which are associated with the quadratic terms \(ax^2\), \(2hxy\), and \(by^2\), remain invariant under translation. This is because these coefficients define the curvature and orientation of the conic section represented by the equation, properties that are independent of the location of the origin of the coordinate system.
Rotation
In the context of rotating the coordinate system for the general second-degree equation \( ax^2 + 2hxy + by^2 + 2gx + 2fy + c = 0 \), certain quantities remain invariant:
-
\( a + b \): The sum of the coefficients of \( x^2 \) and \( y^2 \) remains unchanged by rotation.
-
\( h^2 - ab \): This expression, related to the discriminant of the quadratic part of the equation, is invariant under rotation. It is fundamentally connected to the nature of the conic section (ellipse, hyperbola, or parabola) represented by the equation.
-
\( c \): The constant term in the equation remains invariant under rotation as it does not depend on the orientation of the axes.
-
\( \Delta \): The determinant of the matrix formed by the coefficients \( a \), \( h \), \( b \), \( g \), \( f \), and \( c \), often used in determining the nature of the conic section, also remains invariant under rotation.
Let me demostrante why \(a+b\) and \(c\) are invariant. Before we obtained this equation after rotation.
Invariance of \( a+b \)
Observe the coefficients of \( x^2 \) and \( y^2 \) terms:
- \( x^2 \) coefficient: \( a\cos^2\theta + b\sin^2\theta + 2h\cos\theta\sin\theta \)
- \( y^2 \) coefficient: \( a\sin^2\theta + b\cos^2\theta - 2h\cos\theta\sin\theta \)
Summing these coefficients, using the identity \(\cos^2\theta + \sin^2\theta = 1\):
Invariance of \( c \)
The constant term \( c \) in the equation:
remains entirely unchanged in the rotated equation. Since it is independent of \( \theta \), it demonstrates that \( c \) is invariant under rotation.
It would be more instructive to show invariance of ther quatities geometrically in the chapter of conic sections.