Locus
Curve
A curve in two dimensions is a collection of points in a plane that satisfy a certain relationship between their coordinates. This relationship can be represented by an equation of the form \(f(x, y) = 0\), where \(f(x, y)\) is a mathematical expression involving \(x\) and \(y\).
For example, consider the equation \(x^2 + y^2 - r^2 = 0\). Here, \(f(x, y) = x^2 + y^2 - r^2\), where \(r\) is a constant. This equation describes a circle of radius \(r\) centered at the origin \((0, 0)\) in the Cartesian coordinate system. Every point \((x, y)\) that lies on this circle satisfies the given relationship, illustrating how specific mathematical expressions in \(f(x, y)\) define curves with distinct geometrical properties.
Consider the relationship \(y = x^2\), which describes a parabola. This can be equivalently written as \(y - x^2 = 0\), leading to the form \(f(x, y) = y - x^2\). Here, the expression \(f(x, y)\) explicitly defines the relationship between \(x\) and \(y\). For every point \((x, y)\) that satisfies this equation, the coordinate \(y\) is equal to the square of \(x\). As \(x\) varies over all real numbers, the set of points that satisfy this relationship trace out a parabola, a curve that opens upwards with its vertex at the origin \((0, 0)\).
Definition of Locus
A locus is defined as a set of points that satisfy a specific condition or a set of conditions. These conditions typically involve mathematical relationships or properties that the points must adhere to. For example, in geometry, the locus of points equidistant from a single point forms a circle, with the single point being the circle's center. In algebra, the locus defined by an equation involving \(x\) and \(y\) coordinates represents a curve on a Cartesian plane where every point on the curve satisfies the equation.
Another way to understand locus is this way. Consider a point moving in a plane with complete freedom; it can traverse any part of the plane without constraints. This scenario changes fundamentally when restrictions are imposed on the movement of the point. These restrictions, which dictate the path the point can follow, define a locus. For instance, if a point is constrained to remain equidistant from two given points, say \(A\) and \(B\), its path is not arbitrary. The locus of all positions that the point can occupy under this restriction is the perpendicular bisector of the line segment joining \(A\) and \(B\). This line, the perpendicular bisector, consists of all points in the plane that are equidistant to \(A\) and \(B\). Thus, the concept of a locus emerges from conditions or rules applied to the movement of a point, creating a defined path or area that the point adheres to, which can be visualized through geometric constructions or algebraic expressions.
You can consider the locus as a set of points satisfying certain conditions or as a path of a point moving in the plane while all conditions remain satisfied.
Restrictions and Locus
When restrictions on the movement of a point in a plane are applied, the nature of these restrictions determines the set of points that satisfy them, leading to different geometric figures. These restrictions can range from lenient to strict, affecting the resultant locus significantly.
-
Lenient Restrictions: When the conditions imposed are relatively lenient, they may allow a point to occupy a broad area or region within the plane. For example, if a point is restricted to remain within a certain distance from a fixed point, the locus of all possible positions it can occupy forms a disk.
-
Strict Restrictions: On the other hand, very strict conditions might limit the point to a very constrained path or even a finite set of positions. For instance, if a point must satisfy multiple precise conditions simultaneously, such as being equidistant from two specific points and also lying on a specific line, the number of possible positions can be severely restricted, potentially to a single point or a finite set of points.
Under appropriate conditions, the locus can result in a curve, which is defined as an infinite set of points forming a continuous path in two dimensions. In simpler terms, when we set certain rules for how a point can move on a plane, these rules can sometimes lead to the creation of smooth paths, known as curves. These curves are made up of countless points that all follow the rules we've set. For example, if the rule is that a point must always stay the same distance from a center point, the curve formed by all the points that follow this rule is a circle. Similarly, if the rule is that the distance from a point to a fixed line must always be the same, the curve formed is a parabola. These rules are often written down as equations, and studying these curves helps us understand the connection between the rules (equations) and the shapes or paths they create on the plane. This area of study is rich with interesting shapes and concepts, bridging the gap between the concrete visuals of geometry and the abstract ideas of algebra.
Locus as an equation
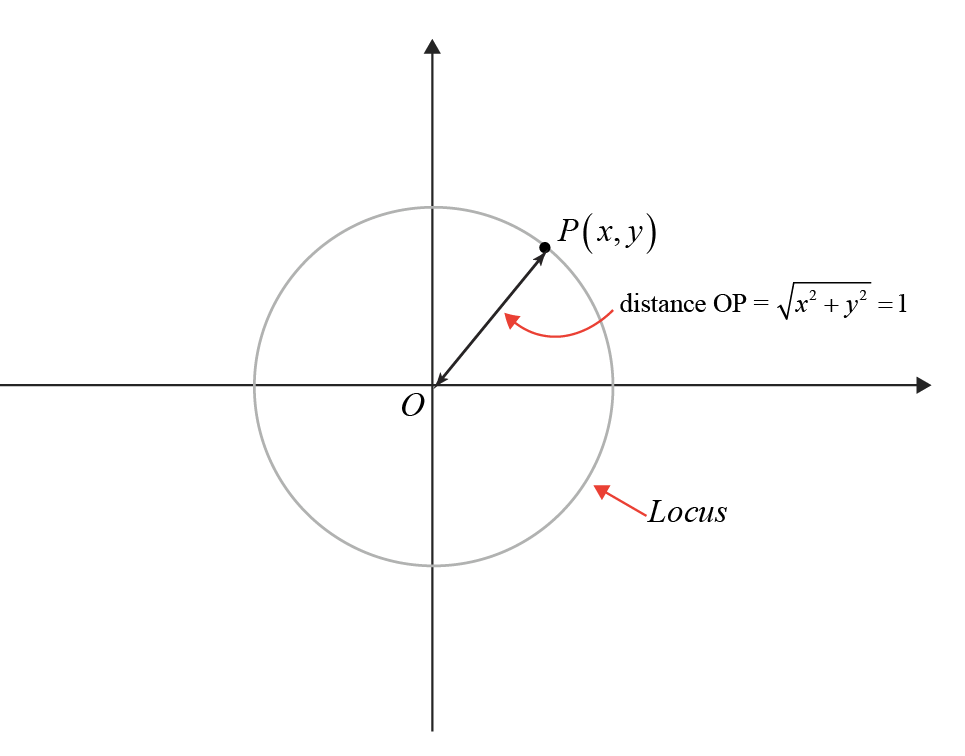
When we plot a point \(P(x, y)\) in the Cartesian coordinate plane, initially, the coordinates \(x\) and \(y\) are independent variables. This independence implies that \(P\) can move freely across the plane without any constraints, capable of occupying any position defined by the combination of \(x\) and \(y\) values. However, the scenario shifts dramatically when we impose specific conditions on the movement of \(P\). These conditions introduce a relationship between \(x\) and \(y\), making them no longer independent. Instead, \(x\) and \(y\) become interdependent, their values now connected by the conditions we've set. The power of coordinate geometry lies in its ability to translate these geometric constraints into mathematical equations, succinctly capturing the relationship between \(x\) and \(y\) and the geometry of the locus they define.
For instance, consider a point \(P(x, y)\) that moves in such a way that its distance from the origin \((0, 0)\) is always equal to 1. The distance \(d\) of any point \(P(x, y)\) from the origin can be expressed using the Pythagorean theorem as \(d = \sqrt{x^2 + y^2}\). Given that the distance is always 1, we have \(\sqrt{x^2 + y^2} = 1\). Squaring both sides to eliminate the square root yields the equation \(x^2 + y^2 = 1\), which is the mathematical relation defining the locus of point \(P\). This equation represents a circle centered at the origin with a radius of 1.
First we are going to look at some common locus. Then we learn about finding locus under arbitrary conditions.
Common Loci
-
The locus of a point that maintains a constant distance from a fixed point is a circle. We know this immediately from our basic knowledge of geometry. To analyze this using coordinate geometry, let's take the fixed point as \((\alpha, \beta)\) and a point \(P(x, y)\) that is always at a distance \(a\) from \((\alpha, \beta)\). The distance between two points in the Cartesian coordinate plane is given by the distance formula:
\[d = \sqrt{(x - \alpha)^2 + (y - \beta)^2}\]Given that the distance \(d\) is constant and equal to \(a\), we have:
\[\sqrt{(x - \alpha)^2 + (y - \beta)^2} = a\]Squaring both sides of the equation to eliminate the square root yields the equation of the circle:
\[(x - \alpha)^2 + (y - \beta)^2 = a^2\]This equation represents the locus of all points \((x, y)\) that are at a constant distance \(a\) from the fixed point \((\alpha, \beta)\), which is a circle with radius \(a\) centered at \((\alpha, \beta)\).
-
The locus of a point that maintains equal distances from two fixed points is the perpendicular bisector of the line segment joining those two points. This principle is grounded in the basic properties of Euclidean geometry, where the set of all points equidistant from two distinct points forms a straight line perpendicular to and bisecting the line segment connecting the fixed points.
Example
Let's consider two fixed points \(A(-a, 0)\) and \(B(a, 0)\), and a moving point \(P(x, y)\) such that the distance from \(P\) to \(A\) (denoted as \(PA\)) is equal to the distance from \(P\) to \(B\) (denoted as \(PB\)).
Given \(A(-a, 0)\) and \(B(a, 0)\), the distances \(PA\) and \(PB\) can be expressed as:
\[PA = \sqrt{(x + a)^2 + (y - 0)^2}\]\[PB = \sqrt{(x - a)^2 + (y - 0)^2}\]Setting \(PA = PB\) to satisfy the condition of equal distances, we have:
\[\sqrt{(x + a)^2 + y^2} = \sqrt{(x - a)^2 + y^2}\]Squaring both sides of this equation eliminates the square roots:
\[(x + a)^2 + y^2 = (x - a)^2 + y^2\]Expanding both sides and simplifying, we find that the \(y^2\) terms cancel out, and we are left with:
\[x^2 + 2ax + a^2 = x^2 - 2ax + a^2\]Further simplification cancels out the \(x^2\) and \(a^2\) terms, leading to:
\[2ax = -2ax\]This simplifies to \(4ax = 0\), and since \(a\) is a fixed non-zero distance, we find that \(x = 0\). Therefore, the locus of point \(P\) is the y-axis (because only on y-axis x is always equal to 0) which is the perpendicular bisector of the line segment \(AB\).
-
The locus of a point \( P \) which moves such that it subtends a right angle at two fixed points, say \( A \) and \( B \), is a circle that passes through \( A \) and \( B \) with \(AB\) as the diameter. This is due to Thales' theorem.
According to Thales' theorem, if \( A \) and \( B \) are points on a circle where the line segment \( AB \) is a diameter of the circle, then the angle subtended at any point \( P \) on the circle is a right angle. Conversely, if a point \( P \) subtends a right angle to \( AB \), then \( P \) must lie on a circle for which \( AB \) is a diameter.
-
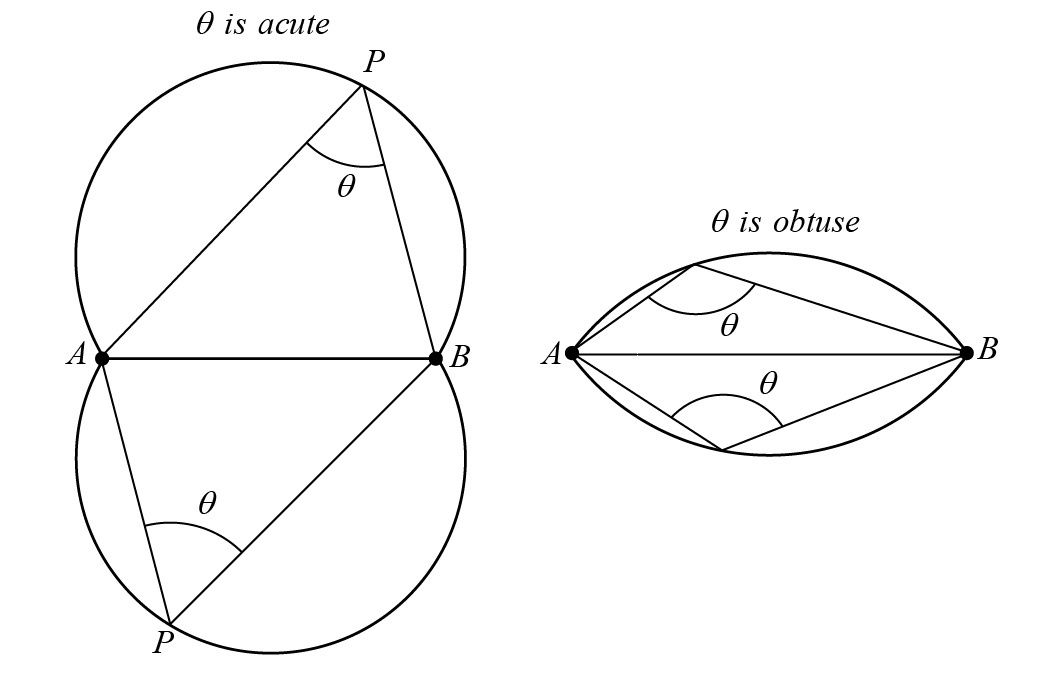
If an angle \( \theta \) is subtended by two fixed points \( A \) and \( B \) at a point \( P \) , the locus of \( P \) consists of two distinct arcs of a circle that both pass through \( A \) and \( B \), with \( AB \) serving as the common chord of these arcs. These arcs represent the possible positions of \( P \) that maintain the constant angle \( \theta \) with respect to \( A \) and \( B \).
This is due the following theorem: If two points are chosen on the circumference of a circle, and a chord is drawn between these two points, then any angle subtended by this chord at the circumference of the circle will be equal, regardless of the position of the point of observation along the circumference, provided the angles are all either in the major segment or the minor segment formed by the chord.
-
The locus of a point which moves such that the ratio of its distances from two fixed points is always constant, denoted as \(\lambda\), leads to different geometrical constructs depending on the value of \(\lambda\):
-
Circle if \(\lambda \neq 1\): The set of points that maintain a constant ratio of distances from two fixed points, where \(\lambda\) is not equal to 1, forms a circle, excluding the case where the circle degenerates into a single point. You can read the proof here.
-
Perpendicular Bisector if \(\lambda = 1\): When \(\lambda = 1\), the condition implies that the distance from the point to one fixed point is equal to its distance to the other fixed point, denoted as \(PA = PB\). This equality means that the point lies on the perpendicular bisector of the line segment connecting the two fixed points. The perpendicular bisector is the locus of all points in a plane equidistant from the two fixed points, fulfilling the criteria for \(\lambda = 1\).
-
Empty Locus if \(\lambda < 0\): A negative ratio of distances (\(\lambda < 0\)) is not possible in Euclidean geometry, as distances are always non-negative. Therefore, when \(\lambda\) is specified as a negative value, the locus does not correspond to any set of points in the plane, resulting in an empty locus.
These conditions reflect the underlying principles of Euclidean geometry, translating the algebraic constraint of a constant distance ratio into specific geometric figures or the absence thereof, based on the nature of the ratio.
-
-
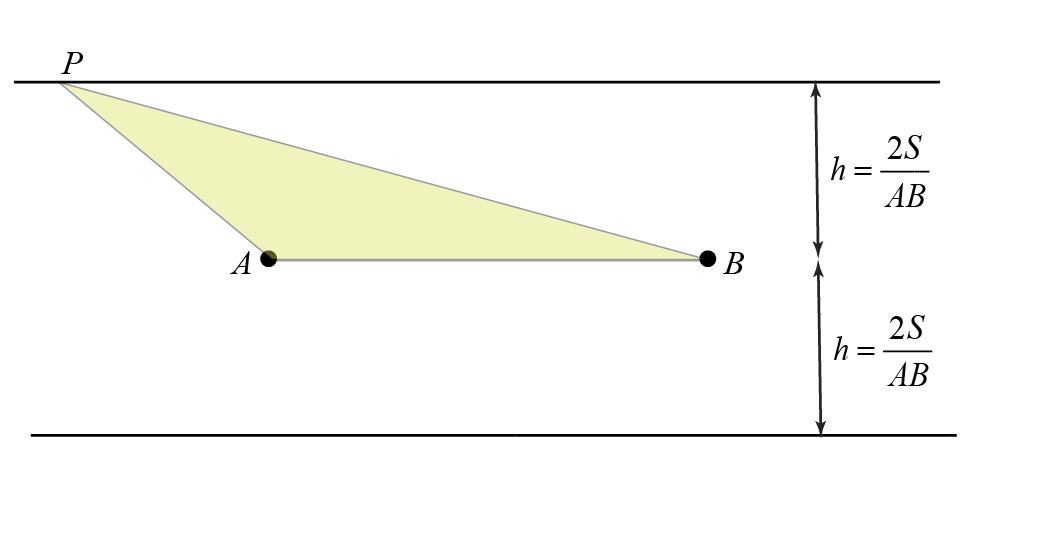
Given two fixed points \(A\) and \(B\), the locus of a point \(P\) such that the area of triangle \(PAB\) is constant and equal to \(S\) consists of two lines parallel to the segment \(AB\) and located symmetrically on either side of it.
To understand this, consider the formula for the area of a triangle, which is \( \frac{1}{2} \times \text{base} \times \text{height} \). In triangle \(PAB\), if we take \(AB\) as the base, then the height \(h\) must be perpendicular to \(AB\) and pass through point \(P\).
For the area of \(PAB\) to remain constant at \(S\), we have:
\[ \text{Area} = \frac{1}{2} \times AB \times h = S \]\[ \implies h = \frac{2S}{AB} \]This equation reveals that for the area to remain constant, regardless of the position of \(P\) along the lines parallel to \(AB\), the height \(h\), which is the perpendicular distance from \(P\) to the line through \(AB\), must also remain constant. Thus, the locus of point \(P\) is defined by the two lines parallel to \(AB\) at a distance of \(h = \frac{2S}{AB}\) on either side. These lines ensure that any point \(P\) located on them will form a triangle \(PAB\) with a constant area of \(S\), as the perpendicular distance (height) from \(P\) to \(AB\) is fixed, satisfying the condition for the area's constancy.
Example
In a Cartesian coordinate system, consider two fixed points \(A(1, 2)\) and \(B(4, 0)\). Determine the locus of a point \(P(x, y)\) such that the area of the triangle formed by \(P\), \(A\), and \(B\) is exactly \(10\) square units. Find the mathematical relationship between \(x\) and \(y\) for point \(P\) that satisfies the given area condition.
Solution:
Given points \(A(1, 2)\) and \(B(4, 0)\) on a Cartesian coordinate system, and a moving point \(P(x, y)\) such that the area of triangle \(PAB\) is \(10\) square units, we aim to find the locus of point \(P\).
To determine the relationship between \(x\) and \(y\), given the condition on the area of triangle \(PAB\), we use the formula for the area of a triangle in a coordinate system:
\[ \text{Area} = \frac{1}{2} \left| x_1(y_2 - y_3) + x_2(y_3 - y_1) + x_3(y_1 - y_2) \right| \]For triangle \(PAB\), substituting \(P(x, y)\), \(A(1, 2)\), and \(B(4, 0)\):
\[ 10 = \frac{1}{2} \left| 1(0 - y) + 4(y - 2) + x(2 - 0) \right| \]\[ 20 = \left| -y + 4y - 8 + 2x \right| \]\[ 20 = \left| 3y + 2x - 8 \right| \]\[ \pm 20 = (3y + 2x - 8) \]This gives us two equations:
- \(20 = 3y + 2x - 8 \implies 3y + 2x - 28 = 0 \)
- \(-20 = 3y + 2x - 8 \implies 3y + 2x + 12 = 0\)
These equations represent two lines. Such linear equations in \(x\) and \(y\) always represents straight lines. We will learn about them later.
-
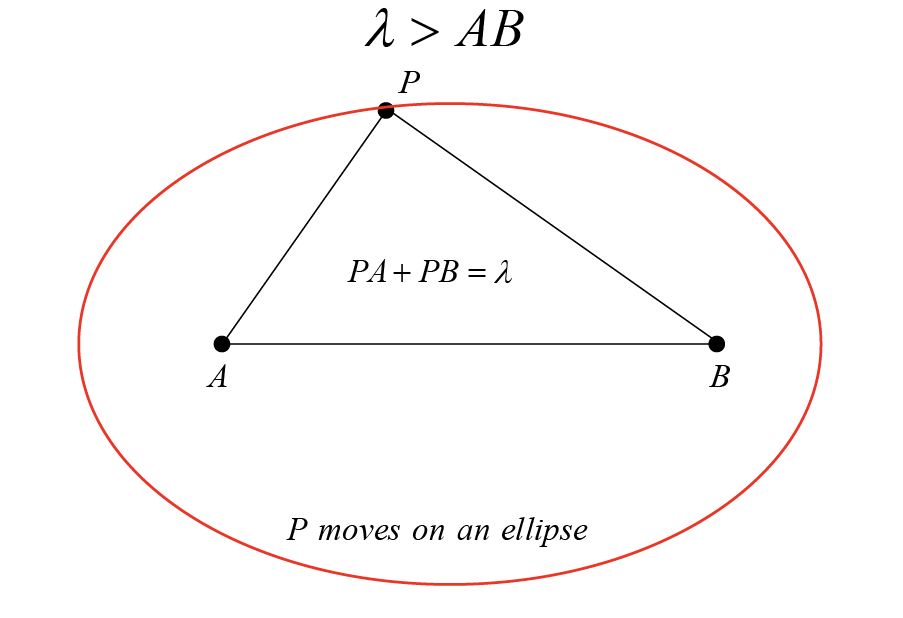
Given two fixed points \(A\) and \(B\), and a moving point \(P\) such that the sum of its distances from \(A\) and \(B\) is always a constant, denoted as \(\lambda\), i.e., \(PA + PB = \lambda\), we observe the following cases based on the value of \(\lambda\) relative to the distance \(AB\):
-
If \(\lambda > AB\): The locus of point \(P\) is an ellipse. In this scenario, the points \(A\) and \(B\) serve as the foci of the ellipse, and the sum of the distances from any point on the ellipse to these foci is equal to the major axis length, which is \(\lambda\). The ellipse represents all points \(P\) for which \(PA + PB = \lambda\), with \(\lambda\) being greater than the distance between the foci \(A\) and \(B\). [If you do not know what an ellipse is, you can ignore everything said about foci, major axis etc. You will study about all this in a later chapter]
-
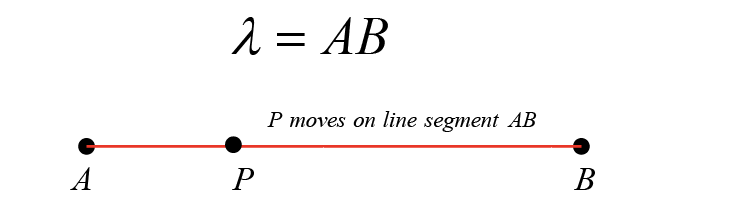
If \(\lambda = AB\): The locus of point \(P\) is the line segment \(AB\) itself. This is because the only positions \(P\) can occupy such that the sum of its distances to \(A\) and \(B\) equals \(AB\) are the points lying directly between \(A\) and \(B\) along the segment connecting them.
-
If \(\lambda < AB\): This case is not possible, as the sum of the distances from any point \(P\) to \(A\) and \(B\) cannot be less than the distance \(AB\) itself. Since \(PA + PB\) must at least equal \(AB\) when \(P\) is on the line segment \(AB\), having \(\lambda < AB\) means there is no position \(P\) can occupy to satisfy this condition, resulting in no locus.
Explanation:
Taking an arbitrary position of point \(P\) in relation to fixed points \(A\) and \(B\), we can analyze the geometric constraints based on the triangle inequality theorem within triangle \(PAB\). This theorem states that the sum of the lengths of any two sides of a triangle must be greater than or equal to the length of the remaining side. Consequently, for triangle \(PAB\), this means \(PA + PB \geq AB\).
Case 1: \(PA + PB > AB\) (i.e., \(\lambda > AB\))
In this scenario, where \(\lambda\) represents the sum of distances \(PA\) and \(PB\), and is greater than \(AB\), triangle \(PAB\) indeed exists and is valid. The condition \(PA + PB > AB\) signifies that point \(P\) can be located in various positions around \(A\) and \(B\), leading to numerous triangles of different shapes and sizes, all adhering to the triangle inequality theorem.
In the context of an ellipse, this case corresponds to situations where point \(P\) moves such that its total distance from points \(A\) (focus 1) and \(B\) (focus 2) is a constant sum greater than the distance between \(A\) and \(B\). Geometrically, this set of points \(P\) forms an ellipse, with \(A\) and \(B\) serving as its foci. Algebraically, the equation of the ellipse can be derived from this constant sum condition. However, the detailed proof of point \(P\)'s path being an ellipse, both geometrically and algebraically, falls under the study of ellipses and will be explored in that context.
The requirement \(PA + PB > AB\) ensures that the ellipse is a closed figure, encapsulating all possible positions of \(P\) that satisfy the given condition. This principle allows the ellipse to be uniquely defined by the distance between its foci (\(A\) and \(B\)) and the length of its major axis (\(\lambda\)), capturing the essence of the geometric relationship dictated by the constant sum of distances from \(P\) to the foci.
Case 2: \(PA + PB = AB\) (i.e., \(\lambda = AB\))
When the condition \(PA + PB = AB\) is met, it implies that the sum of the distances from point \(P\) to points \(A\) and \(B\) equals the distance between \(A\) and \(B\). In this specific scenario, \(PAB\) does not form a triangle in the traditional sense, because the only way for the sum of \(PA\) and \(PB\) to equal \(AB\) is for point \(P\) to lie directly on the line segment \(AB\).
This placement of \(P\) along the line segment \(AB\) means that \(P\) essentially divides \(AB\) into two smaller segments, \(PA\) and \(PB\), whose lengths sum to the total length of \(AB\). The result is not a triangle with area but a linear alignment of points \(A\), \(P\), and \(B\).
Case 3: \(PA + PB < AB\) (i.e., \(\lambda < AB\)) The situation where \(PA + PB < AB\) is geometrically impossible because it violates the triangle inequality theorem. If one were to attempt to construct a triangle under this condition, they would find it cannot exist within the realm of Euclidean space. This impossibility underpins the understanding that the locus described by \(PA + PB = \lambda\), with \(\lambda < AB\), does not yield any valid positions for \(P\), affirming that no locus exists under this constraint.
Example
Given points \(A(-1,0)\) and \(B(1,0)\), and a moving point \(P(x,y)\) such that \(PA + PB = 4\), we are tasked to find the equation of the locus of \(P\).
Solution:
Step 1: Express \(PA\) and \(PB\)
\[PA = \sqrt{(x + 1)^2 + y^2}\]\[PB = \sqrt{(x - 1)^2 + y^2}\]Given \(PA + PB = 4\), we substitute \(PA\) and \(PB\):
\[\sqrt{(x + 1)^2 + y^2} + \sqrt{(x - 1)^2 + y^2} = 4\]Step 2: Isolate and Square
Take one square root term to the other side and square both sides to eliminate the square root:
\[\left(\sqrt{(x + 1)^2 + y^2}\right)^2 = \left(4 - \sqrt{(x - 1)^2 + y^2}\right)^2\]Expanding both sides:
\[(x + 1)^2 + y^2 = 16 - 8\sqrt{(x - 1)^2 + y^2} + (x - 1)^2 + y^2\]Step 3: Isolate the Remaining Square Root and Square Again
Combining like terms and simplifying:
\[ \begin{align*} &8\sqrt{(x - 1)^2 + y^2} = 16 - 4x \\ \implies \ &\sqrt{(x - 1)^2 + y^2} = 2 - \frac{1}{2}x \\ \implies \ &(x - 1)^2 + y^2 = \left( 2 - \frac{1}{2}x \right)^2 \\ \implies \ &x^2 - 2x + 1 + y^2 = 4 - 2x + \frac{1}{4}x^2 \\ \implies \ &x^2 - \frac{1}{4}x^2 - 2x + 2x + y^2 = 4 - 1 \\ \implies \ &\frac{3}{4}x^2 + y^2 = 3 \\ \implies \ &\frac{x^2}{4} + \frac{y^2}{3} = 1 \\ \end{align*} \]This equation is the required locus. This kind of equation always represent an ellipse. We will learn about this in future.
-
-
Given two fixed points \(A\) and \(B\), and a moving point \(P\) such that the absolute difference in distances from \(A\) to \(P\) and from \(B\) to \(P\) is always equal to a constant \(\lambda\), i.e., \(|PA - PB| = \lambda\), we consider the geometric implications of different values of \(\lambda\) in relation to the distance \(AB\):
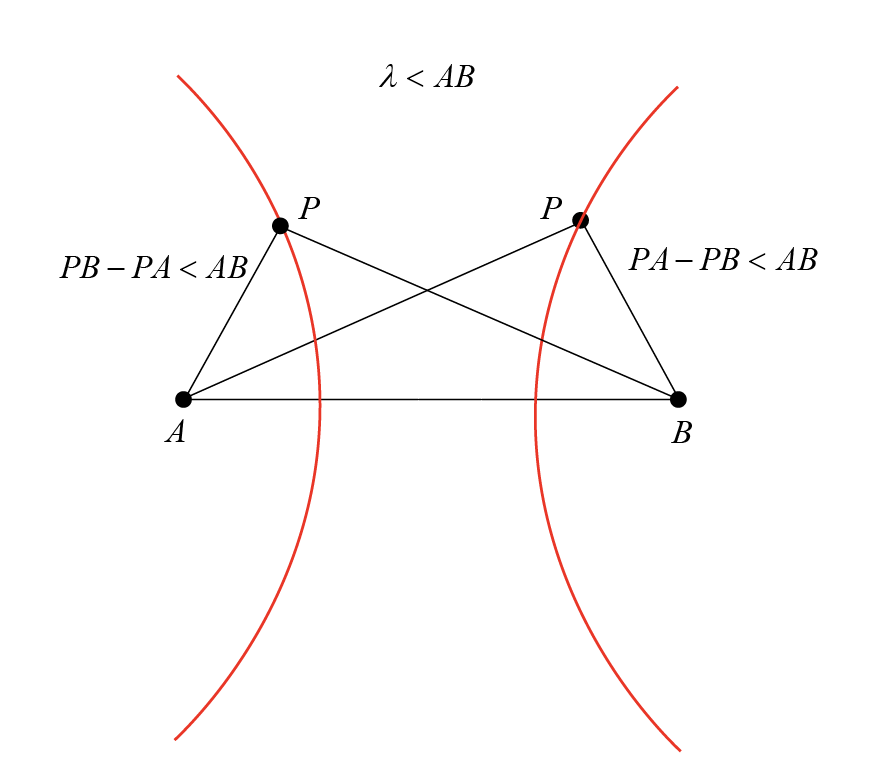
Case 1: \(\lambda < AB\)
- Hyperbola: When \(\lambda\) is less than the distance between \(A\) and \(B\), the locus of point \(P\) forms a hyperbola. In this scenario, points \(A\) and \(B\) serve as the foci of the hyperbola. The absolute difference in distances from any point on the hyperbola to the foci is constant and equal to \(\lambda\). This case defines the two separate branches of a hyperbola, where each branch is a distinct set of points \(P\) satisfying the given condition.
Case 2: \(\lambda = AB\)
- Rays Emanating from A and B: If \(\lambda\) equals the distance \(AB\), the locus of point \(P\) consists of two rays. These rays emanate from \(A\) and \(B\) in opposite directions, extending indefinitely away from the segment \(AB\). This case is unique because it essentially reduces the locus to the direct paths extending from \(A\) and \(B\) along the line through \(A\) and \(B\), but not including the segment \(AB\) itself.
Case 3: \(\lambda > AB\)
- No Locus: When \(\lambda\) is greater than the distance between \(A\) and \(B\), there is no possible locus for point \(P\) that satisfies the condition \(|PA - PB| = \lambda\). In the context of Euclidean geometry, the requirement that the absolute difference in distances be greater than the distance between \(A\) and \(B\) cannot be met by any point \(P\) in the plane, resulting in no geometrically feasible locus.
These cases highlight the diverse geometric constructs that can arise from varying a single parameter, \(\lambda\), in relation to a fixed distance \(AB\), demonstrating the rich interplay between algebraic conditions and their geometric interpretations.
Explanation:
Consider an arbitrary position of \(P\) with respect to \(A\) and \(B\). It forms a triangle \(\delta PAB\).
Using the triangle inequality \( |PA - PB| \leq AB \), we have two cases to consider:
Case 1: \( |PA - PB| < AB \)
This condition implies that \( P \) forms a valid triangle with \( A \) and \( B \), as the absolute difference in distances is less than the distance \( AB \). Hence, \( P \) is not collinear with \( A \) and \( B \), and a triangle can indeed be formed. This setup is associated with a hyperbola, where \( A \) and \( B \) are the foci, and for any point \( P \) on either branch of the hyperbola, the absolute difference in distances to the foci is a constant value less than \( AB \). The hyperbola will be studied in greater detail in later chapters where its algebraic equation and properties will be examined.
Case 2: \( |PA - PB| = AB \)
In this case, the triangle inequality becomes an equality. This implies that \( P \) does not form a triangle with \( A \) and \( B \) but rather is collinear with them. Since the absolute difference in distances equals \( AB \), \( P \) must lie on the line extended through \( A \) and \( B \), but it cannot lie on the line segment \( AB \) itself. Instead, \( P \) must be located on the rays extending from \( A \) towards \( B \), or from \( B \) towards \( A \), continuing indefinitely in the directions away from the segment \( AB \).