Introduction to Coordinate Geometry
René Descartes introduced the Cartesian coordinate system in the 17th century, establishing a foundation for analytical geometry. This system utilizes two axes, typically denoted as the x-axis (horizontal) and y-axis (vertical), intersecting at a point called the origin, designated as (0, 0). Points in the plane are identified by ordered pairs (x, y), where x represents the horizontal distance from the origin and y the vertical distance. This innovation allowed for the algebraic representation of geometric shapes and facilitated the analysis of geometric properties using algebraic equations, significantly advancing mathematical and scientific investigations.
The Cartesian coordinate system bridges geometry and algebra by providing a framework where geometric figures can be represented through algebraic expressions and vice versa. This conversion is achieved through several key principles:
-
Point Representation: Every point in the Cartesian plane is identified by an ordered pair (x, y), where 'x' and 'y' are numerical coordinates that indicate the point's position relative to two perpendicular axes, the x-axis and the y-axis. This allows geometric locations to be described algebraically.
-
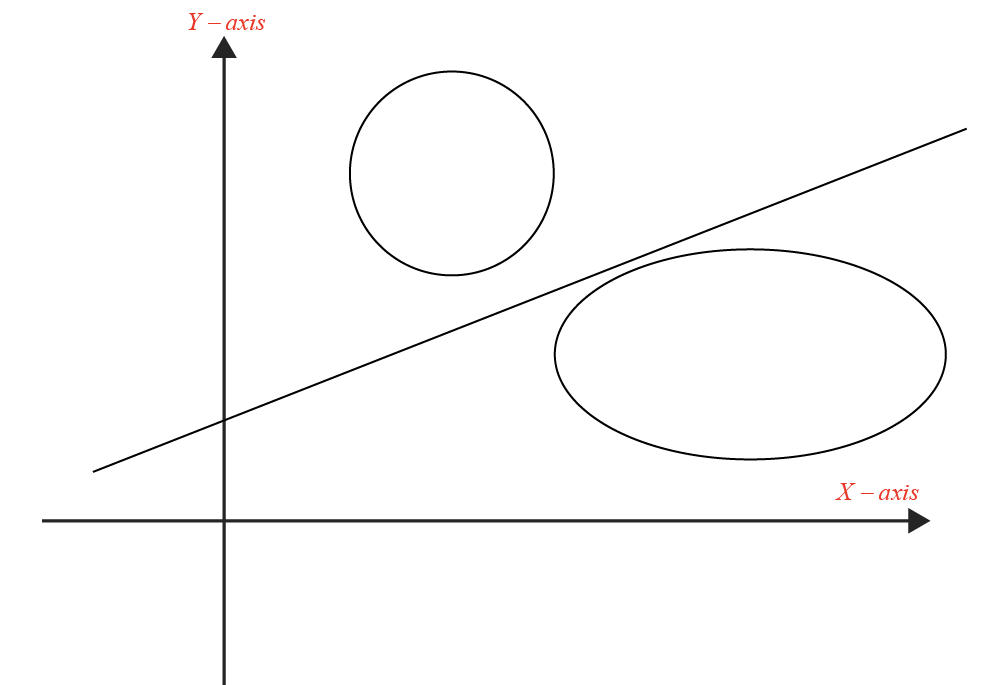
Equation of a Line: A straight line in the Cartesian plane can be expressed by a linear equation of the form y = mx + b, where 'm' is the slope of the line, representing the ratio of the vertical change to the horizontal change between any two points on the line, and 'b' is the y-intercept, the point where the line crosses the y-axis. This linear equation encapsulates the geometric property of a line algebraically.
-
Conic Sections: Geometric shapes such as circles, ellipses, parabolas, and hyperbolas, known as conic sections, are represented by quadratic equations. For example, a circle with radius 'r' centered at the origin is described by the equation \(x^2 + y^2 = r^2\). These equations provide a direct algebraic method to study the properties and relationships of geometric figures.
-
Distance Formula: The distance 'd' between two points \((x_1, y_1)\) and \((x_2, y_2)\) in the plane is given by the formula \(d = sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2}\), which is derived from the Pythagorean theorem. This formula translates a geometric concept, distance, into an algebraic expression.
-
Slope and Angle: The slope of a line, a fundamental geometric concept indicating the direction and steepness of a line, is directly related to the tangent of the angle the line makes with the positive x-axis, providing a link between algebraic and trigonometric analyses.
-
Transformation and Translation: Geometric transformations, including translation, rotation, and scaling, can be expressed algebraically using equations or matrices. For example, translating a point (x, y) by a distance (a, b) results in a new point (x + a, y + b).
By converting geometric concepts into algebraic expressions, the Cartesian coordinate system enables the use of algebraic techniques to solve geometric problems, facilitating the development of calculus and furthering the study of mathematical physics and engineering.
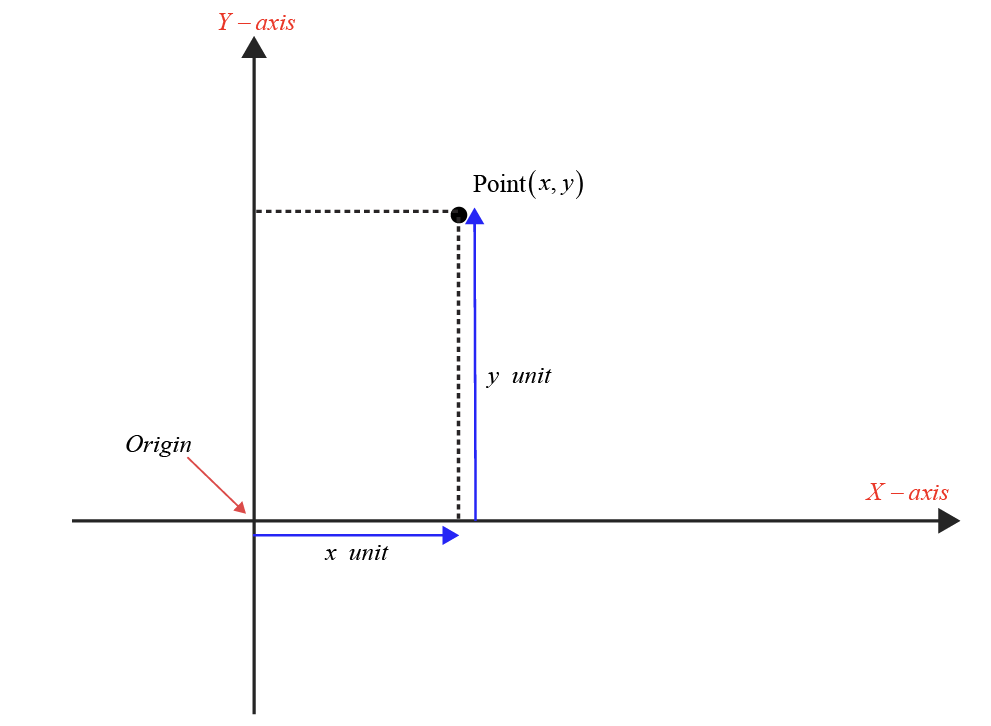
The Cartesian coordinate system facilitates the conversion of geometric problems into algebraic equations by establishing a one-to-one correspondence between points in a plane and ordered pairs of real numbers. This system is defined by two perpendicular axes, typically labeled \(x\) (horizontal axis) and \(y\) (vertical axis), which intersect at a point called the origin, denoted as \(O(0, 0)\).
In this framework, any point \(P\) in the plane can be uniquely identified by an ordered pair \((x, y)\), where \(x\) represents the horizontal distance of \(P\) from the origin (positive to the right and negative to the left), and \(y\) represents the vertical distance of \(P\) from the origin (positive upwards and negative downwards). This process, known as Cartesian coordinate representation, transforms geometric locations into algebraic forms, enabling the application of algebraic methods to solve geometric problems.
For instance, geometric concepts such as lines, circles, and polygons can be represented algebraically as equations in \(x\) and \(y\). A line in the plane can be expressed by a linear equation \(y = mx + b\), where \(m\) is the slope and \(b\) is the y-intercept. Similarly, a circle with radius \(r\) and center at \((h, k)\) can be described by the equation \((x - h)^2 + (y - k)^2 = r^2\).
This algebraic representation allows for the utilization of algebraic techniques to analyze geometric properties, solve equations for intersection points, and explore the behavior of geometric shapes, effectively bridging the gap between geometry and algebra.
Cartesian Coordinate Sytem
In the Cartesian coordinate system, the location of any point on a plane is determined by measuring its distance from two perpendicular lines, known as axes, that intersect at a point called the origin. The system uses two axes:
- x-axis (Horizontal Axis): Extends to the right and left of the origin.
- y-axis (Vertical Axis): Extends above and below the origin.
The origin is the point of intersection of the x-axis and y-axis, denoted as \(O(0, 0)\), serving as the reference point for measuring distances along the axes.
To measure the location of a point \(P\) in this plane, one follows these steps:
- Determine the x-coordinate (\(x\)) of point \(P\): This is the horizontal distance from the origin to \(P\), measured along the x-axis. It is positive if \(P\) is to the right of the origin and negative if to the left.
- Determine the y-coordinate (\(y\)) of point \(P\): This is the vertical distance from the origin to \(P\), measured along the y-axis. It is positive if \(P\) is above the origin and negative if below.
The coordinates \((x, y)\) form an ordered pair that uniquely identifies the location of \(P\) in the plane. This ordered pair is referred to as the Cartesian coordinates of \(P\).
Using this system, geometric problems involving points, lines, and shapes can be translated into algebraic expressions, facilitating the application of algebraic methods to solve geometric questions.
Besides the Cartesian coordinate system, locations of points in a plane can also be measured using the Polar and Oblique coordinate systems, among others. Each system offers a unique method for specifying the position of points.
Quadrants
The intersection of the x and y axes divides the plane into four regions, called quadrants, which are numbered counterclockwise starting from the quadrant where both coordinates are positive:
- First Quadrant: Both x and y coordinates are positive (\(x > 0, y > 0\)).
- Second Quadrant: x is negative and y is positive (\(x < 0, y > 0\)).
- Third Quadrant: Both x and y coordinates are negative (\(x < 0, y < 0\)).
- Fourth Quadrant: x is positive and y is negative (\(x > 0, y < 0\)).
Abscissa and Ordinate
In the Cartesian coordinate system, the position of any point is given as an ordered pair \((x, y)\), where:
- Abscissa (x): The horizontal coordinate of a point, representing its distance from the y-axis. The abscissa indicates the point's location along the x-axis.
- Ordinate (y): The vertical coordinate of a point, representing its distance from the x-axis. The ordinate indicates the point's location along the y-axis.
Signs of Abscissa and Ordinate in Different Quadrants
- In the first quadrant, both the abscissa (x) and ordinate (y) are positive, reflecting points to the right of the y-axis and above the x-axis.
- In the second quadrant, the abscissa (x) is negative, and the ordinate (y) is positive, reflecting points to the left of the y-axis and above the x-axis.
- In the third quadrant, both the abscissa (x) and ordinate (y) are negative, reflecting points to the left of the y-axis and below the x-axis.
- In the fourth quadrant, the abscissa (x) is positive, and the ordinate (y) is negative, reflecting points to the right of the y-axis and below the x-axis.
On Axes
- Points on the x-axis have their ordinate (y) equal to zero (\(y = 0\)) because they are neither above nor below the x-axis.
- Points on the y-axis have their abscissa (x) equal to zero (\(x = 0\)) because they are neither to the right nor to the left of the y-axis.
The Cartesian coordinate system's structured approach to locating points makes it a fundamental tool in mathematics, physics, engineering, and many other fields, enabling precise communication about positions in a plane.
Polar Coordinate System
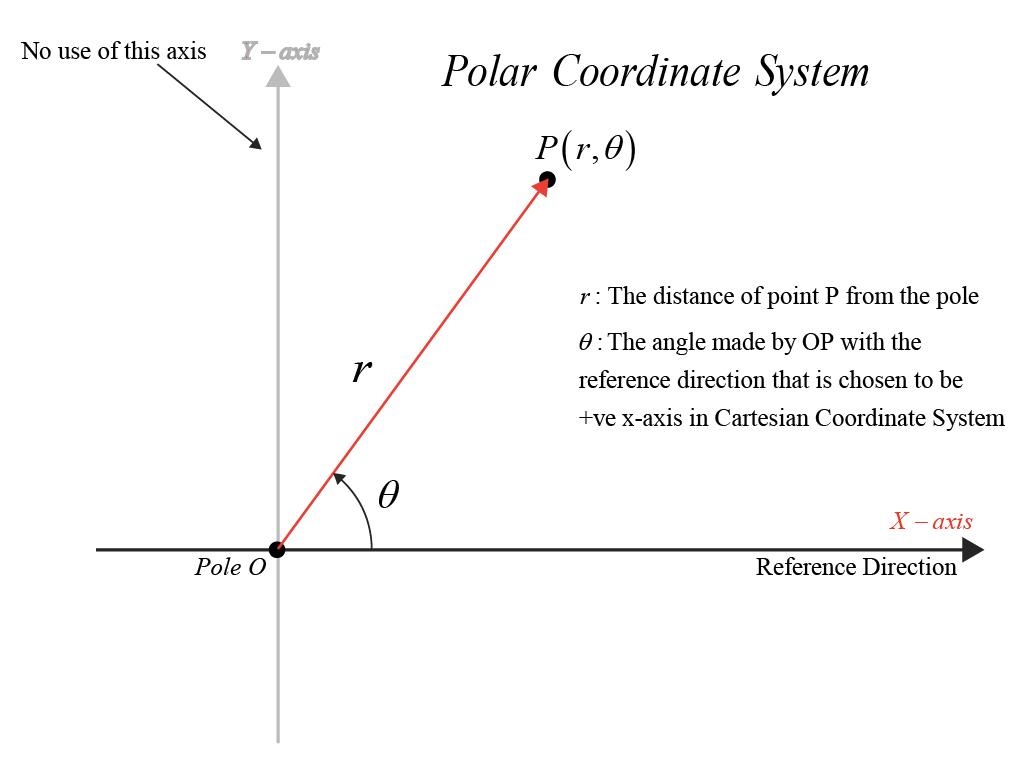
The Polar coordinate system represents points on a plane using a distance and an angle from a fixed point and direction. A point \(P\) in the polar coordinate system is given by the ordered pair \((r, \theta)\), where:
- \(r\) is the radial distance from a fixed origin point, often referred to as the pole.
- \(\theta\) is the angle measured from a fixed direction, typically the positive x-axis of a Cartesian system, to the line segment connecting the point to the origin.
This system is particularly useful in contexts where the relationship or motion of objects is naturally circular or angular.
Oblique Coordinate System
The Oblique coordinate system, less common than the Cartesian and Polar systems, uses axes that meet at a point but are not perpendicular. In this system, a point \(P\) is described by an ordered pair \((a, b)\), where:
- \(a\) and \(b\) represent the distances along two intersecting axes.
- The axes form an acute or obtuse angle with each other, unlike the right angle in Cartesian coordinates.
This system can be useful in specific applications where the geometry of the problem aligns with oblique angles, although it lacks the straightforward orthogonal projections of the Cartesian system and the radial symmetry of the Polar system.
Each of these coordinate systems provides a unique framework for describing the location of points and has specific applications where it offers advantages over the others, whether in simplifying calculations, matching the symmetry of the problem, or providing more intuitive descriptions of motion or relationships.